MIT Developing Humanoid Capable of Parkour Acrobatics

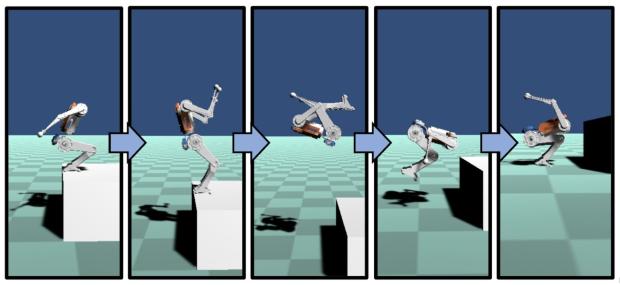
Somewhat resembling MIT’s Mini Cheetah, the new MIT-designed dynamic acrobatic humanoid robot operates with a new leg design featuring actuators with higher power and torque density than the Cheetah. MIT’s Matt Chignoli comments, “The main focus of the leg design is to enable smooth but dynamic ‘heel-to-toe’ actions that happen in humans’ walking and running, while maintaining low inertia for smooth interactions with ground contacts. …Dynamic ankle actions have been rare in humanoid robots. We hope to develop robust, low inertia and powerful legs that can mimic human leg actions. …As we continue to improve the performance of our proprioceptive actuator technology, as we have done for this work, we aim to demonstrate that our unique combination of high torque density, high bandwidth force control, and the ability to mitigate impacts is optimal for highly dynamic locomotion of any legged robot, including humanoids.” Story and photos courtesy of Spectrum.IEEE.org. Click here for a Cornell University report, and here for a Spectrum.IEEE.org news update.