ACEINNA Launches OpenIMU ROS Driver for Development of Robotic Navigation Systems

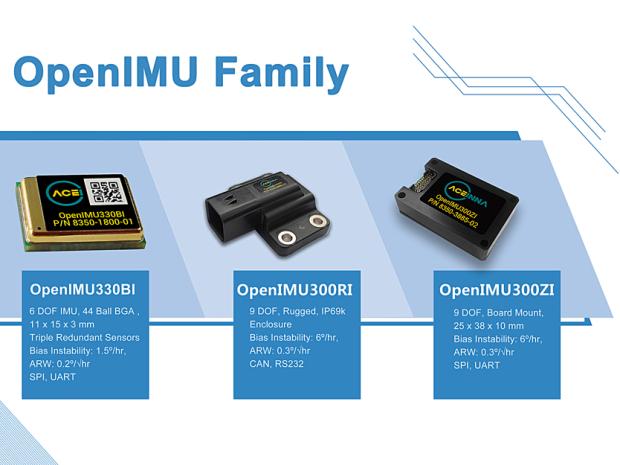

Available on the Sensors Page at ROS.org and GitHub this new driver enables robotic application developers to quickly and easily integrate highly accurate (<1.5°/hr) IMU’s into their navigation guidance systems. The new ROS Driver currently works with the ACEINNA’s versatile OpenIMU family, which includes the OpenIMU300ZI, OpenIMU300RI, and OpenIMU330BI. Each sensor has its own distinct hardware features, allowing the user several options for their unique application. The open-source nature of this architecture makes each device highly configurable as well. ACEINNA’s OpenIMU’s have several software applications available, with source code available via Github and the ACEINNA Extension on Microsoft Visual Studio Code. Software applications include IMU, VG-AHRS, and INS.
For more info on the ROS Driver, please visit this page:
http://wiki.ros.org/aceinna_openimu
For more on the OpenIMU family, please visit this site:
https://www.aceinna.com/